Program Overwiew
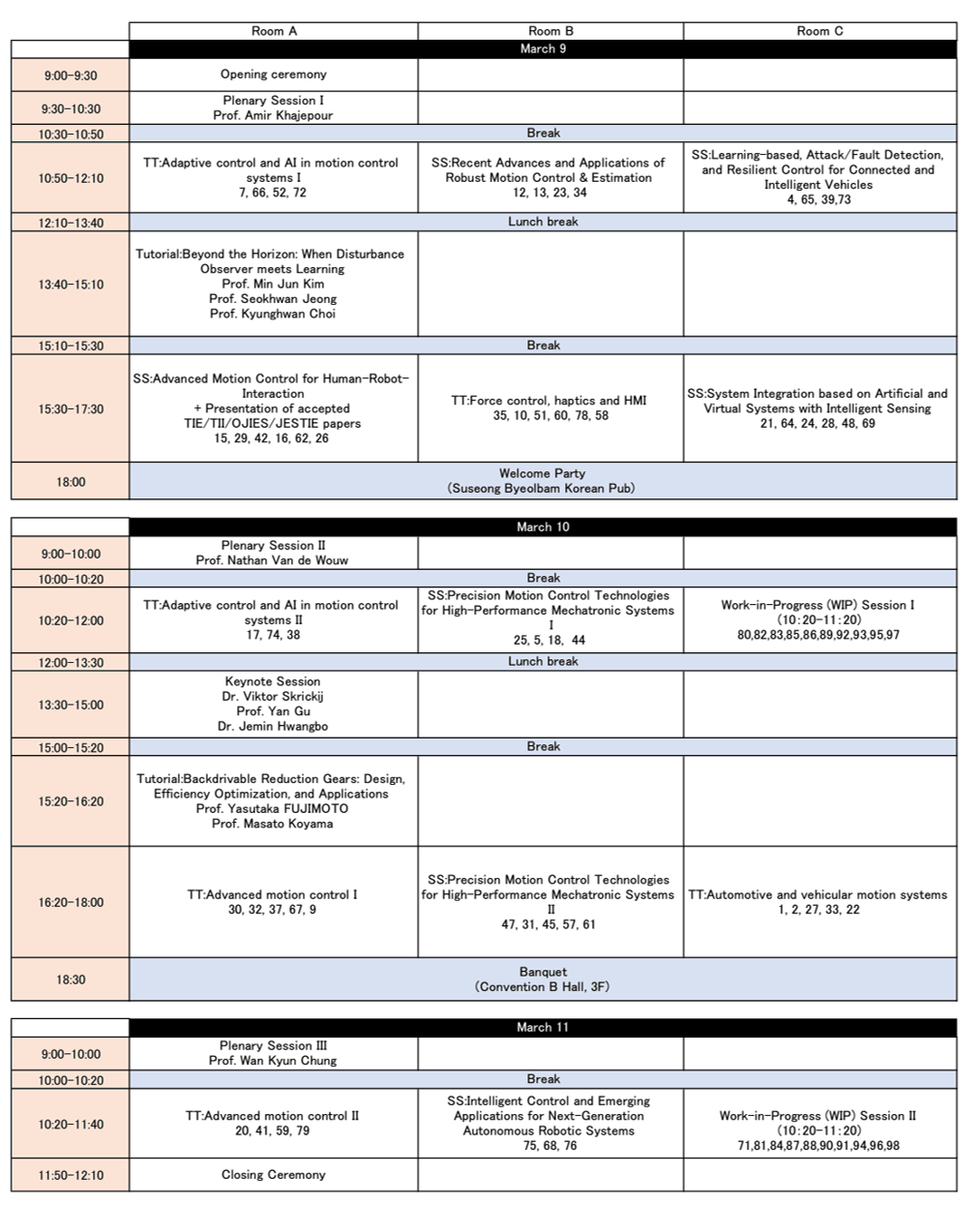
AMC 2026 Schedule(List of all sessions and Program chart)
Plenary Talks



Title: Intelligent and Dependable Control for Cyber-Physical Mobility Systems
Prof. Amir Khajepour
University of Waterloo, Canada
Abstract:
Cyber-physical mobility systems, such as advanced vehicles and intelligent transportation platforms, demand control architectures that are both scalable and dependable. This talk presents a unified framework that integrates hybrid modeling, combining physics-based representations with data-driven learning to capture complex subsystem interactions and uncertainties. Building on this foundation, a learning-agent–based Model Predictive Control (MPC) approach enables real-time adaptation, continual learning, and dynamic prioritization of competing objectives across diverse vehicle operating modes and environments. These methods enhance robustness, reduce calibration complexity, and improve transferability across varying configurations of actuators, sensors, and propulsion systems. Applications span vehicle motion control, autonomous mobility, and energy-efficient operation in dynamic environments. The talk highlights how hybrid modeling and intelligent control can transform modern mobility systems into self-adaptive, reliable, and high-performance platforms capable of meeting the challenges of next-generation transportation.
Speaker Bio:
Amir Khajepour is a Professor of Mechanical and Mechatronics Engineering and the Executive Director of the Waterloo Center for Automotive Research (WatCAR) at the University of Waterloo, Canada. He held the Tier 1 Canada Research Chair in Mechatronic Vehicle Systems from 2008 to 2022 and the Senior NSERC/General Motors Industrial Research Chair in Holistic Vehicle Control from 2017 to 2022. His work has led to the training of over 200 PhD and MASc students, 35 patents, more than 600 research publications, numerous technology transfers, and the creation of several start-up companies. He has been recognized with the Engineering Medal from Professional Engineers Ontario and is a Fellow of the Engineering Institute of Canada, the American Society of Mechanical Engineers, and the Canadian Society of Mechanical Engineering.
Title: Data-driven Controller Optimization for High-tech Mechatronic Systems
Prof. Nathan Van de Wouw
Eindhoven University of Technology, Netherlands
Abstract:
High-tech systems such as electron microscopes and semiconductor equipment require extreme positioning accuracy and speed. The performance achievable through model-based controller design is often limited by unknown disturbance characteristics, unmodeled dynamics, and changing operating conditions. In this talk, we present data-driven techniques for automated controller tuning that optimize performance in terms of settling time and tracking error. In particular, extremum seeking control is proposed as a framework that enables both performance optimization and stability guarantees. A key advantage of extremum seeking control is its ability to support both offline calibration and online lifelong learning. We demonstrate that data-driven optimization can deliver significant performance gains in linear, time-varying, and nonlinear controllers, with guaranteed stability and robustness. Industrial case studies highlight the impact on real-world high-tech systems, such as electron microscopes, wire bonders, and lithography equipment.
Speaker Bio:
Nathan van de Wouw obtained his Ph.D.-degree in Mechanical Engineering from the Eindhoven University of Technology, the Netherlands, in 1999. He currently holds a full professor position at the Mechanical Engineering Department of the Eindhoven University of Technology, The Netherlands, and chairs the Dynamics and Control section. He has held a (part-time) full professor position the Delft University of Technology, the Netherlands, from 2015-2019. He has also held an adjunct full professor position at the University of Minnesota, U.S.A, from 2014-2021. He has published the books ‘Uniform Output Regulation of Nonlinear Systems: A convergent Dynamics Approach’ with A.V. Pavlov and H. Nijmeijer (Birkhテ、user, 2005) and `Stability and Convergence of Mechanical Systems with Unilateral Constraints’ with R.I. Leine (Springer-Verlag, 2008). In 2015, he received the IEEE Control Systems Technology Award “For the development and application of variable-gain control techniques for high-performance motion systems”. In 2025, he received the Springer Nature Best paper award for the journal ‘Nonlinear Dynamics’. He is an IEEE Fellow for his contributions to hybrid, data-based and networked control.
Title: NRIC (Nonlinear Robust Internal loop Compensator) and its application to Robotics
Prof. Wan Kyun Chung
Pohang University of Science and Technology, South Korea
Abstract:
In this talk, a way to provide robustness to robot control is introduced based on Nonlinear optimal theory and the NRIC (Nonlinear Robust Internal-loop Compensator). A solution to the Hamilton-Jacobi-Isaacs equation is derived in the form of PID control, which is a solution of the inverse optimal control problem. From the well-known disturbance observer, it is extended to a nonlinear system. By the robustness obtained by NRIC, we can have better performance for position and interactive control of robots, for example, impedance control in SE(3). Furthermore, the NRIC is reformulated based on the Lie algebra se(3) of the Lie group SE(3). Since the Lie algebra se(3) is isomorphic to a six-dimensional vector space, we can make use of many properties inherited from the linear vector space to develop the new type of NRIC.
Speaker Bio:
He received the B.S. degree in mechanical design from Seoul National University, Seoul, South Korea, in 1981, and the M.S. degree in mechanical engineering and the Ph.D. degree in production engineering from Korea Advanced Institute of Science and Technology, Daejeon, Korea, in 1983 and 1987, respectively. Dr. Chung is currently Professor of the Department of Mechanical Engineering at the Pohang University of Science and Technology. His research interests include the development of robust controllers for precision motion control, biomedical robotics, and AI-based biorobotics with sponsorship by national agencies (Korea Research Foundation , Department of Commerce and Industry) and industries. He has published over 180 journal papers and 350 refereed conference papers. He has more than 11,000 citations, and his H-index is 52. Dr. Chung has served as a program committee member for IEEE ICRA and IROS almost every year. He served as a Conference Local Arrangement Chair for the 1999 IEEE/IROS conference, VIDEO proceeding chair in 2001 ICRA. He served as an Editor for IEEE Transactions on Robotics from 2008 to 2013, Editor-in-Chief for Intelligent Service Robotics by Springer Nature during 2016-2022, and International Editorial Board for Advanced Robotics. He is a co-author of 3 books published by Springer-Verlag. In 1988, he was a Visiting Professor with the Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA. In 1995, he was a Visiting Scholar at the University of California, Berkeley, Berkeley, CA, USA. Dr. Chung was designated as an IEEE Fellow in 2016, IEEE Life Fellow 2024, member of the National Academy of Engineers of Korea in 2017. He was the president of Korea Robotics Society in 2013.
Keynote Speeches

Title: Sliding-Mode Control Techniques for Multi-Actuated Ground Vehicles
Dr. Viktor Skrickij
Viktor Skrickij, VILNIUS TECH, Research Director, Lithuania
Abstract:
Sliding mode control (SMC) has good traditions in automotive applications. With the emergence of multi-actuated vehicle concepts, new complex control tasks are arising, where SMC can further demonstrate its benefits. In this regard, this talk will begin with a brief introduction to SMC, highlighting recent advancements in SMC theory. Implementation examples will be showcased, particularly focusing on the primary drawback of SMC - chattering, and effective strategies to mitigate this issue will be presented. Two case studies will be discussed: the first focuses on direct yaw moment control in four-wheel-steered ground vehicles utilizing barrier function adaptation, while the second addresses active suspension control through a PID-like continuous SMC approach.
Biography:
Viktor Skrickij currently serves as the Director and Chief Researcher at the Transport and Logistics Competence Centre at VILNIUS TECH (Vilnius Gediminas Technical University) in Lithuania. He earned his B.S., M.S., and Ph.D. degrees in Transport Engineering from the same institution in 2008, 2010, and 2014, respectively. His research interests encompass vehicle dynamics and control as well as driving environment perception. Viktor is a member of SAE, serves on several international standardization committees in road transportation, as well as on evaluation committees of the European research funding agencies. He is also Principal Investigator and Coordinator in several European Union projects on motion control systems, electric vehicles, automated driving, freight transportation, and railway safety.
Title: Prediction & Reaction in Motion: Humanoid Control for Non-Inertial Worlds and Athletic AI
Prof. Yan Gu
Associate Professor of Mechanical Engineering, Purdue University, United States
Abstract:
Humanoids must predict and react in unpredictable, fast-changing environments. This talk presents a unified perspective on whole-body control across two complementary fronts: dynamic locomotion and manipulation when the support surface accelerates, and athletic behavior in table tennis that compresses perception-action cycles to sub-second horizons. Together, these fronts define an emerging research frontier in acceleration-aware, time-critical control that prioritizes anticipation, coordination, and reliable execution. In non-inertial settings, platform accelerations act as unknown, time-varying disturbances that invalidate common assumptions in modeling, state estimation, planning, and control. I will describe my group’s recent advances in both model-based and learning-based approaches that enable robust locomotion and loco-manipulation on dynamic rigid surfaces, including acceleration-aware estimation that separates platform motion from robot motion; contact-rich whole-body planning and control that couple foot placement, center-of-mass motion, and hand contacts to exploit or mitigate platform motion; and hybrid and adaptive control strategies that stabilize behavior under time-varying support pose and velocity. These results target high-impact applications such as shipboard operations and public-transit interventions, where reliable function requires reasoning in accelerating frames. As a complementary stress test, athletic table tennis exposes limits in the timing and precision of existing perception and decision-making approaches. I will present an end-to-end reinforcement learning framework that maps ball observations and robot proprioception to coherent arm swing and footwork, relaxes common hitting-plane constraints, and achieves rapid, accurate returns with versatile two-dimensional footwork in simulation and in zero-shot hardware deployment. I will close by synthesizing lessons across both regimes, emphasizing prediction under tight time constraints and reaction through coordinated whole-body motion, and by outlining evaluation protocols and open problems for generalizable humanoid control in highly dynamic real-world contexts.
Biography:
Dr. Yan Gu received her B.S. degree in Mechanical Engineering from Zhejiang University (China) in June 2011 and her Ph.D. degree in Mechanical Engineering from Purdue University in August 2017. She was with the Department of Mechanical Engineering at the University of Massachusetts Lowell (UML) as an Assistant Professor between September 2017 and July 2022. She joined the School of Mechanical Engineering at Purdue University as an Associate Professor in July 2022. Her long-term research goal is to realize autonomous and intelligent humanoid locomotion and manipulation in dynamic, complex open-world environments. She received the Young Investigator Program (YIP) Award from the Office of Naval Research in 2024, Faculty Early Career Development Program (CAREER) Award from the National Science Foundation in 2021, Verizon’s 5G Robotics Challenge Award in 2019, Excellence in Teaching Award from UML’s College of Engineering in 2019, Magoon Teaching Award from Purdue’s College of Engineering in 2013, Frederick N. Andrews Fellowship at Purdue University in 2011, and Chu Kochen Scholarship at Zhejiang University in 2010. Dr. Gu is an Associate Editor for IEEE/ASME Transactions on Mechatronics, IEEE Robotics and Automation Letters, and IFAC Mechatronics, as well as a Guest Editor for the Special Issue “Impact-Aware Robotics” of IEEE Transactions on Robotics.
Title: Deep Reinforcement Learning for High-Agility Manoeuvres in Quadrupedal Robots
Prof. Jemin Hwangbo
Associate Professor of Department of Mechanical Engineering, KAIST, South Korea
Abstract:
At present, quadrupedal robots represent some of the most robust legged platforms for practical deployment, with control architectures increasingly capable of navigating intricate locomotion challenges in unstructured environments. Reinforcement Learning (RL) has emerged as a primary catalyst for these advancements, facilitating a synergy between high-performance agility and operational safety. This presentation delineates the evolution of quadrupedal control systems, with a particular focus on state-of-the-art AI-driven methodologies. Furthermore, I will highlight the specific research milestones and technological contributions pioneered at KAIST.
Biography:
Dr. Jemin Hwangbo is an associate professor at KAIST. He holds a Ph.D. and a master’s degree from ETH Zurich, and a bachelor’s degree from the University of Toronto. His research interests include legged robotics and autonomous robot navigation. He recently founded Raion Robotics Inc., a company dedicated to advancing legged robotics, particularly quadrupedal robots.
Tutorial 1
Beyond the Horizon: When Disturbance Observer meets Learning



Title: Contact-responsive High-gain Motion Control via Constrained Disturbance Observer
Prof. Min Jun Kim
Associate Professor, the School of Electrical Engineering, KAIST, South Korea
Abstract:
In this talk, I will present a novel Disturbance Observer (DOB) framework called the Constrained DOB (C-DOB). This innovative framework incorporates constraints through an optimization approach, enhancing the versatility of DOB designs. In particular, I will focus on a specific application: the Contact-Responsive High-Gain Motion Controller (CRMC). As the name implies, the CRMC accurately tracks desired trajectories in free-space while effectively responding to external contacts. Traditionally, it has been thought that such responsiveness is unachievable, as external forces are indistinguishable from disturbances. However, the C-DOB framework facilitates this capability by designing constraints that intentionally sacrifice some robustness when the constraint is about to be violated. Additionally, I will showcase various extensions of this framework alongside real-world robotic experiments.
Biography:
Min Jun Kim is an Associate Professor at the School of Electrical Engineering at KAIST. Prior to joining KAIST, he was a research scientist at the Institute of Robotics and Mechatronics at DLR, Germany. He received his Ph.D. in Mechanical Engineering from Pohang University of Science and Technology (POSTECH) in Korea, where he focused on nonlinear control of robotic systems. His research interests include robust nonlinear control, physical interactions, aerial manipulation, under-actuated systems, geometric methods, and intelligent robot manipulation.
Title: How Far Can We Expand the Role of DOB? : From Low-Level Control to Learning
Prof. Seokhwan Jeong
Associate Professor, the Department of Mechanical Engineering, Sogang University, South Korea
Abstract:
Designing, integrating, and controlling practical robotic systems inevitably involves encountering diverse engineering challenges. Particularly in low-level control, when a system fails to track desired trajectories due to model uncertainties or external forces, the Disturbance Observer (DOB) has served as an effective tool for compensating for unexpected disturbances. While DOB has proven highly successful in low-level motion control, its expansion into higher-level system architectures has been limited. However, with the recent explosive growth of Reinforcement Learning (RL) in robotics, there is a growing interest in incorporating DOB structures into the learning process and system linearization to enhance learning efficiency. In this tutorial, I will share research experiences applying DOB to construct efficient systems across various platforms, including robot hands, actuators, surgical robots, and transmission systems. Furthermore, I will introduce recent efforts to incorporate DOB structures into the RL framework for in-hand manipulation, specifically aiming to enhance grasping robustness against dynamic uncertainties.
Biography:
Prof. Seokhwan Jeong is currently an Associate Professor in the Department of Mechanical Engineering at Sogang University, Seoul, Korea. He leads the Robotics and Intelligent Mechanisms (RIM) Lab. His research interests include the design and control of robotic systems, with a focus on intelligent mechanisms, design, robust control, and their integration with modern machine learning techniques for advanced robotic applications.
Title: DOB Orchestrates Online Model-Based Reinforcement Learning
Prof. Kyunghwan Choi
Assistant Professor, the Cho Chun Shik Graduate School of Mobility, KAIST, South Korea
Abstract:
Model-based reinforcement learning (MBRL) offers a promising framework for combining learning and optimal control, yet its practical deployment in deterministic motion control systems remains challenging due to model bias, sensor noise, uncertainty handling, and limited online adaptability. In particular, many existing approaches rely on heavy ensemble-based models and offline training, which are often difficult to implement in real-time control applications. This tutorial presents a control-oriented view of MBRL in which disturbance observers (DOBs) play a central role in enabling online model learning and uncertainty handling. By interpreting residual dynamics and external disturbances through DOBs, lightweight and physically interpretable observer-based mechanisms are introduced as alternatives or complements to ensemble-based uncertainty estimation. These disturbance estimates are leveraged for online residual model learning, uncertainty-aware exploration, and adaptive rollout strategies within off-policy actor–critic frameworks. Through conceptual discussions and reproducible examples, the tutorial bridges classical observer-based control and modern MBRL, providing practical insights into implementing online, uncertainty-aware MBRL for motion control applications.
Biography:
Kyunghwan Choi is an Assistant Professor at the Cho Chun Shik Graduate School of Mobility at KAIST, and Director of the Mobility Intelligence and Control Laboratory (MIC Lab). His research focuses on optimal and learning-based control for connected, automated, and electrified vehicles (CAEVs). He received his B.S., M.S., and Ph.D. degrees in Mechanical Engineering from KAIST. He held positions at KAIST and GIST before rejoining KAIST in 2025 as an Assistant Professor.
Tutorial 2
Backdrivable Reduction Gears: Design, Efficiency Optimization, and Applications

Prof. Yasutaka FUJIMOTO
Yokohama National University, Professor of Division of Intelligent Systems Engineering, Japan
Abstract:
For safety considerations, cooperative robots are typically equipped with actuators consisting of a low-power servo motor, a reduction gearbox, and a torque sensor. When these robots come into contact with humans or their surroundings, they must detect the contact force using a force sensor, contact sensor, or joint torque sensor. However, incorporating such sensors increases both the cost and the physical size of the system. This can be avoided if the actuator exhibits sufficient backdrivability. To address this issue, we propose a method to maximize the power transmission efficiency of a 3K planetary reduction gearbox and develop a prototype of a backdrivable reduction gearbox, termed the bilateral drive gear. The profile shift coefficients and the number of teeth were optimized under specific design constraints to achieve maximum efficiency. As a result, the prototype demonstrated forward- and backward-driving efficiencies exceeding 90%, with a reverse-drive starting torque of several tens of mN*m. Finally, we introduce several prototype gearboxes with different gear ratios and sizes, as well as their potential applications.
Biography:
YASUTAKA FUJIMOTO received the B.E., M.E., and Ph.D. degrees in electrical and computer engineering from Yokohama National University, Yokohama, Japan, in 1993, 1995, and 1998, respectively. In 1998, he joined the Department of Electrical Engineering, Keio University, Yokohama, Japan. Since 1999, he has been with the Department of Electrical and Computer Engineering, Yokohama National University, where he is currently a professor. His research interests include actuators, robotics, manufacturing automation, and motion control. Dr. Fujimoto is a Senior Member of IEEE and IEE of Japan and a member of Robotics Society of Japan. He was the recipient of the IEEE/ASME Transaction on Mechatronics Best Paper Award in 2020. He is an Associate Editor for the IEEE Journal of Emerging and Selected Topics in Industrial Electronics and an Editor-in-Chief for the IEEJ Journal of Industry Applications.
Prof. Masato Koyama
Assistant Professor, Department of Electric and Electrical Engineering, Mie University, Japan
Abstract:
A back-drivable, high-efficiency, high-reduction gearbox has been developed recently. The high backdrivability of this gearbox offers significant advantages for safe robot operation and for maximizing the actuator’s output density. On the other hand, electric power generation systems such as wind turbines require highly efficient gearboxes to increase the generator speed. By using a high gear-ratio gearbox such as a Bilateral Drive (BD) gear, the overall volume of the wind turbine (generator and gearbox) can be reduced, and the output power density (kW/m³) with the BD gear is theoretically around ten times larger than that of a turbine using a conventional gearbox such as a single-stage planetary gear. Although the BD gear has these advantages, a more precise control system is required, since motor torque errors are also amplified by the gear ratio. In particular, in wind turbine systems, there is concern that a regenerative torque deviated from an optimal operating point may stop the turbine. To address these issues, we are developing a robust Maximum Torque Per Ampere (MTPA) control using an online identification method, and an instantaneous Maximum Power Point Tracking (MPPT) control.
Biography:
MASATO KOYAMA received the B.E. degree in electric and electrical engineering from National Institute of Technology, Kisarazu College, Kisarazu, Japan, in 2012, and the M.E. and Ph.D. degrees in electrical and computer engineering from Yokohama National University, Yokohama, Japan, in 2014 and 2017, respectively. Since 2017, he has been with the Department of Electric and Electrical Engineering, Mie University, where he is currently Assistant professor. His research interests include actuators, power electronics, motor drives, and motion control. Dr. Koyama is a member of IEEE, IEE of Japan, Robotics Society of Japan, and Society of Instrument and Control Engineers. Since 2020, he has served as a secretary for IEEJ SAMCON.